- 最終更新日
- 記事公開日
サーボモーターやラズパイZEROをモバイルバッテリーで動かす(オートパワーオフの回避方法)
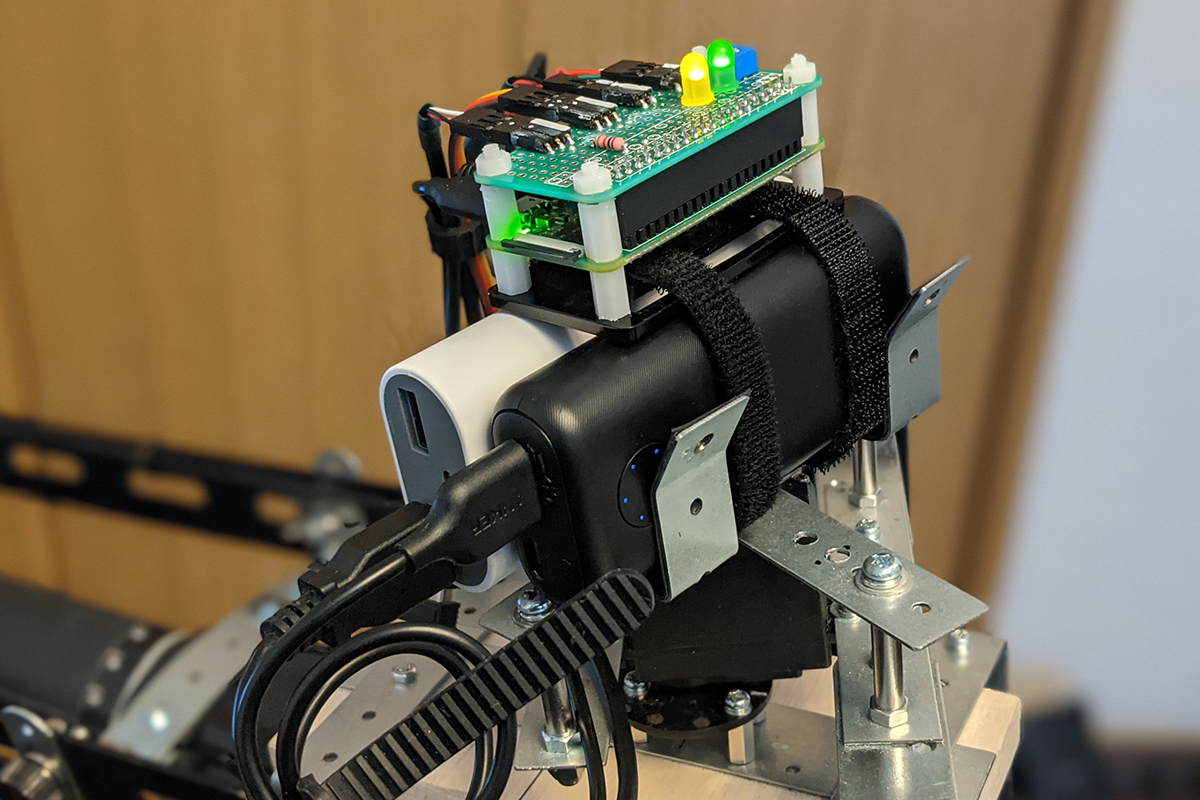
サーボモーターとラズパイZEROをモバイルバッテリーだけで動かすことができました。
サーボモーター用とラズパイ用、2つのモバイルバッテリーに分けて電源を取っています。

- サーボモーター用:【白】ELECOM DE-M01L-6400(2.6A / 5V)6400mAh
- ラズパイ用:【黒】Anker PowerCore II 6700(2A / 5V)6700mAh
最初は、モバイルバッテリー1つ(2.6A / 5V)にサーボモーターとラズパイZEROを繋いでいたのですが、電流不足で、すぐにラズパイの電源が落ちてしまいました。
オートパワーオフの回避方法
本来、モバイルバッテリーはスマホなどの充電に使用するものなので、少しでも電流が流れていない時間が数秒続くと、出力が止まってしまう仕様となっています。
そこで、ある程度の電流をずっと引っぱり出しておく回路が必要です。
「どれくらいの電流があれば、ずっと出力し続けるか?」はモバイルバッテリーの種類によって違いますが、今回使用したモバイルバッテリーでは、以下の場合は通りでした↓
- ELECOM DE-M01L-6400 ⇒ 100mA以下で出力停止
- Anker PowerCore II 6700 ⇒ 50mA以下で出力停止
ラズパイZEROの待機電流は80mAあるので、Ankerのモバイルバッテリーであれば、繋いでおくだけでオートパワーオフを回避できます。
対して、ELECOMのモバイルバッテリーでモーターを動かすには、100mA以上の電流を流し続ける必要があります。
そこで、以下のような回路を組み、余裕をもって約125mAの電流を流し続けるようにしました。
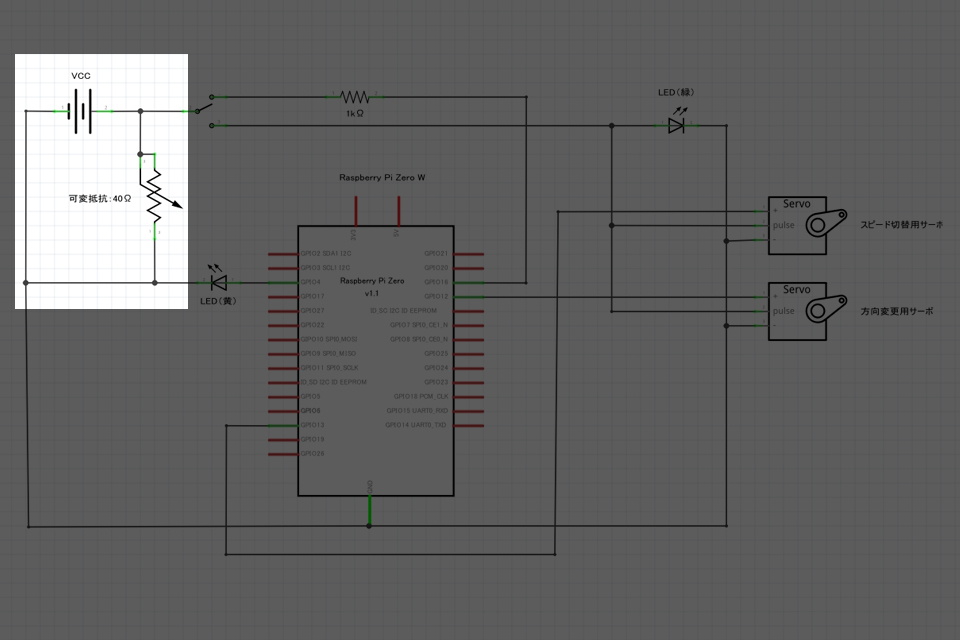
エレコム以外のモバイルバッテリーを使うときの事を考えて、可変抵抗を使用しています。
※可変抵抗の値は「40Ω」に設定。
5V ÷ 40Ω= 0.125A = 125mA
今回、使用したサーボモーターは、「TowerPro MG996R」です。

MG996のデータシートでは、必要な電流が以下の通りとなっています↓
- アイドル電流(待機状態で流れる電流):10mA
- 無負荷電流(空回し状態で流れる電流):170mA
- ストール電流(最大負荷が掛かったときに流れる電流):1400mA

なお、ラズパイZERO Wの電流仕様は以下の通りです↓
- アイドル電流(待機状態で流れる電流):80mA
※今回、ラズパイにはUSBレシーバーを取り付けており、またモーターと同じバッテリーに接続すると電源が落ちることから、稼働時には1A以上の消費電流があると思われます。